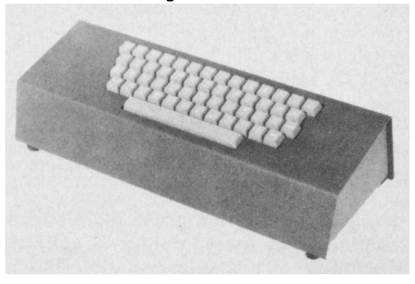
40 years ago, I was given an old keyboard from my high school teacher, the SP-251 (don’t know the vendor). It was optical. There was a anodized black metal plate inside the keyboard with 13 channels running left to right. The left side of each channel had a small incandescent bulb. The right side had a CdS photo cell at the end of each channel. Along the top was a metal rod which held the top end of the metal bars attached to each key. Each of these bars ran top to bottom with a spring to keep them up out of the channels. Each key had a different combination of tabs that protruded downward, so that when a key was pressed, the tabs broke some of the beams, encoding the value of the key. Strangely, the bit coding of these tabs was not ASCII nor the older EBCDIC, as far as I was able to tell at the time. In hind sight, it clearly is not.
I’ve been slowly making my way through O’Reilly’s Bash Cookbook: Solutions and Examples for Bash Users, 2nd edition, by Carl Albing & JP Vossen. It’s a great book but is enormous and not really structured for reading from beginning to end, as much as for referring to to solve a specific problem. I doubt I will ever finish it. But, there are a lot of great factoids in there! Last year, I read Packt’s Mastering Embedded Linux Programming, second edition, by Chris Simmonds, as well as Embedded Linux Development Using Yocto Project, second edition, by Alex Gonzalez (both of which I should do reviews on), and picked up a few of the commands I mention below in those books.
I learned Unix shell commands first on a DEC Vax 11-780 starting about 1984 at college, and then more over time using various distros of Linux from maybe 1997 onward. I’ll admit that most of what I know about ‘sh’ and ‘bash’ are from long ago.
Up until recently, I worked at Neato Robotics in the bay area, on their next generation robot vacuum. As part of that project, I became fairly familiar with how to control and acquire data from their famous Botvac LDS — laser distance scanner — which has become fairly popular in the hobby robotics realm due to its low cost and integration with ROS. Often, that integration is done with the whole Botvac robot owing to its USB serial port and open command line access to sensor data and motor movements.
Recently I learned that there are, not surprisingly, some Chinese laser scanners that look eerily like the Neato one. These scanners boast longer ranges and smaller size, and a similar price on Amazon. I’m interested in figuring out how much these are direct copies of the Neato LDS vs. a reimagining / reengineering of it. So, I went ahead and purchased both an RPLiDAR A1M8 and a YDLIDAR X4.
Recently I’ve undertaken a period of deep study related to Linux in all its aspects, but especially for embedded programming. While I’ve used Linux off and on professionally and privately for at least 18 years, my knowledge has always been just enough to get by.
I’ve programmed embedded systems for most of the last 40 years. And of those 40, 30 were using C. (Oh My God…) C is like an old friend to me… but I’m growing restless and uneasy. I’m sorry C, but we’re growing apart. “What have you done for me lately?”
Our upstairs bathroom has no heat — no ducts run there — so we have a small electric wall-mounted space heater for cold winter months. We already replaced it once, as the Cadet Company in Washington State issued a recall on it. But that was 20 years ago.
In general it was still working fine, but during the most recent winter it started to come on by itself in the middle of the night, first on colder nights, and as the winter went on, even when it was not so cold. I became concerned that this thing would end up on continuously when we were out of town, overheat, and burn the place down.
[Unfortunately I didn’t take any photos… all I have left of the repair are fading memories, an email for the replacement part in January 2015, and a working dishwasher.]
One day our 20 year old dishwasher ran dry. Literally. No water was entering, though it pretended to go through the motions.
I used to have a 2007 Zenn NEV (neighborhood electric vehicle) by Feel Good Cars / ZENN Motor Company. This small car was one of the very first mass-produced electric vehicles available in the US, that was not truly a suped-up golf cart. However, having shipped in low volumes and eventually going out of business, the car is not without some major flaws. One of the most common to fail, and expensive to repair, is the speedometer / odometer / battery level display, what Zenn calls the Instrument Cluster. When mine started to fail, it at first seemed to be related to moisture. My car has another common flaw, a leaky roof due to a failure of the glue that holds down the roof panel. After using a dehumidifier to dry out the car, I noticed the display started working again. However, this cure did not last for long, and later attempts to fix the display failures did not succeed.